Курсовая работа: Динамический синтез систем автоматического управления
![]()
Тогда, модуль частотной передаточной функции:
![]() (1.2)
(1.2)
Относительную динамическую ошибку системы определим по формуле:
![]()
Подставляя значение ω k в формулу, получим ![]()
Тогда находим ![]()
Относительная динамическая ошибка системы 25,4% , следовательно, система не удовлетворяет требованиям ТЗ.
Проверим, удовлетворяет ли система требованиям ТЗ в переходном режиме, т.е. ![]()
Для этого нужно построить график переходной характеристики по выходу ДОС.
![]()
![]()
Для построения используем программный пакет MathCad

Рисунок 1.5 Переходная характеристика по выходу ДОС
Для определения перерегулирования (s) воспользуемся формулой:
![]()
![]()
Тогда ![]()
Т.е. получили, что перерегулирование удовлетворяет требованиям ТЗ.
Теперь найдем время регулирования (tp ). Для этого строим “коридор”, равный ±0,022![]()
Из рисунка видно, что tp =1,04с
Т.е. время регулирования не удовлетворяет требованиям ТЗ и данную систему следует откорректировать.
1.2 Анализ системы с пропорциональным регулятором
1.2.1 Структурная схема линеаризованной системы с пропорциональным регулятором
Пропорциональный регулятор реализует простейший линейный закон управления, при котором управляющий сигнал, подаваемый на вход объекта управления, представляет собой усиленный по величине и по мощности сигнал ошибки (рассогласования). В системах с невысокими требованиями такой закон иногда может обеспечить приемлемое качество регулирования и всегда полезно узнать, не относится ли к ним и наша система.
Cоставим структурную схему с пропорциональным регулятором:
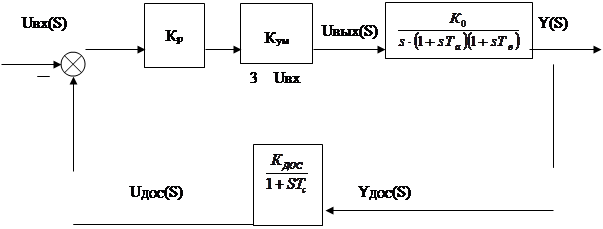 |
Рисунок 1.6 Структурная схема с пропорциональным регулятором
В установившемся режиме заданную точность обеспечивает низкочастотный участок. Проще всего оценить точность системы по ее реакции на гармонический входной сигнал.
![]() ,
,