Курсовая работа: Динамический синтез систем автоматического управления
Найдем перерегулирование ![]()
Для определения tp построим “коридор” равный ![]() .
.
tp =22,72 с.
Показатель колебательности определяется по АЧХ замкнутой системы.
Запишем передаточную функцию замкнутой системы по выходу ДОС
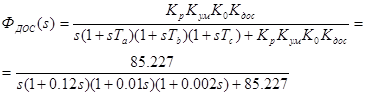 (1.8)
(1.8)
Преобразуем и выделим вещественную и мнимую части:
![]() ;
;
![]() .
.
Запишем модуль частотной передаточной функции по выходу ДОС:
 (1.9)
(1.9)
По формуле (1.9) построим АЧХ замкнутой системы
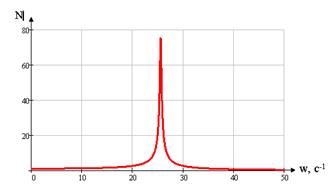
Рисунок 1.12 АЧХ замкнутой системы по выходу ДОС
Показатель колебательности определим по формуле:
![]() ,
,
где ![]() максимальное значение ординаты АЧХ замкнутой системы по выходу ДОС;
максимальное значение ординаты АЧХ замкнутой системы по выходу ДОС;
N (0) – значение ординаты АЧХ при w =0 .
По рисунку определяем:
![]() ; N (0)=1 ;
; N (0)=1 ;
Откуда находим: M =75,214
Анализ на соответствие системы с пропорциональным регулятором требованиям ТЗ
Проверим систему на требования по точности воспроизведения входного сигнала.
Относительную динамическую ошибку системы определим по формуле:
![]()
![]() ;
; ![]()
Передаточная функция разомкнутой системы:
![]()
Тогда, модуль частотной передаточной функции:
