Курсовая работа: Динамический синтез систем автоматического управления
Используем передаточную функцию разомкнутой системы (1.10)
![]()
Для получения частотной передаточной функции заменим S на jw и преобразуем

![]()
Вещественная и мнимая части соответственно:
![]() (1.11)
(1.11) ![]() ; (1.12)
; (1.12)
Тогда

![]() .
.
ЛАЧХ и ЛФЧХ разомкнутой системы представлены ниже.
ЛАЧХ скорректированной системы сместилась вправо, следовательно, необходимые требования по точности выполняются, запасы устойчивости увеличились по сравнению с системой с пропорциональным регулятором.
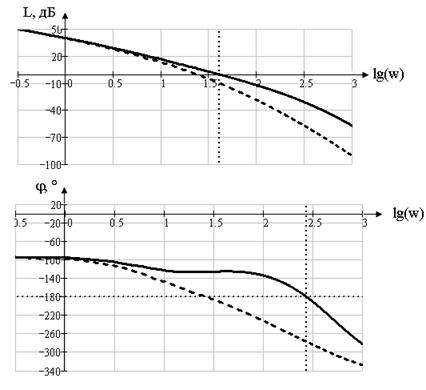
–– ЛАЧХ и ЛФЧХ скорректированной системы
- - ЛАЧХ и ЛФЧХ системы с пропорциональным регулятором
Рисунок 1.15 ЛАЧХ и ЛФЧХ систем
Построим график АФЧХ по имеющимся формулам (1.11) и (1.12) и сравним его с графиком системы с пропорциональным регулятором. Он представляет собой годограф Найквиста, поэтому сделаем ниже дополнительно выводы об устойчивости системы.
Составим таблицу, изменяя w от 0 до ∞:
Таблица 1.3
| W , | P(w) | Q(w) |
| 0 | -10,604 | -∞ |
| 852,2 | 0 | 5,806*10-3 |
| 274,2 | -0,094 | 0 |
| 0 | 0 |
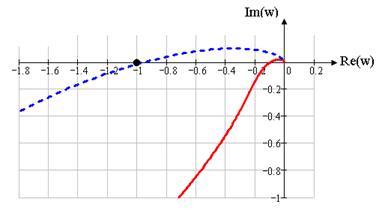
–– годограф скорректированной системы
- - годограф системы с пропорциональным регулятором
Рисунок 1.16 – Годограф Найквиста
Характеристическое уравнение имеет вид:
![]()
Все корни характеристического уравнения, кроме одного нулевого, левые, следовательно, разомкнутая система на границе устойчивости. Для устойчивости замкнутой системы необходимо и достаточно, чтобы годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал особу точку (-1; j0). Данное условие выполняется, значит, замкнутая система устойчива.
Построим годограф Михайлова для системы.
Передаточная функция замкнутой системы:
 (1.13)
(1.13)
Функция Михайлова имеет вид:
![]() (1.14)
(1.14)