Курсовая работа: Проектирование и расчёт следящей системы автоматического управления
4.1 Моделирование переходных процессов в скорректированной САУ
Для проверки соответствия показателей качества скорректированной системы заданным показателям качества проведем моделирование переходного процесса с помощью пакета прикладных программ SIAM.
g(t) x(t) y(t)
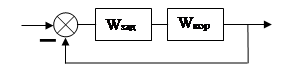
Рисунок 4.1 - Структурная схема скорректированной САУ.
Полученная переходная характеристика скорректированной системы представлена на рисунке 4.2.
По полученной переходной характеристике определим прямые показатели качества:
![]()
![]() время регулирования, время в течении которого отклонение выходной величины от установившегося значения становится меньше заданной величины ∆.
время регулирования, время в течении которого отклонение выходной величины от установившегося значения становится меньше заданной величины ∆.
∆=(0.05÷0.1)h∞ =0.05∙1=0.05; (4.1)
Следовательно время регулирования равно:
![]()
σ – перерегулирование, максимальное отклонение выходной величины от установившегося значения по отношению к установившемуся значению:
![]() (4.2)
(4.2)
По полученным критериям видно, что они не превышают заданных значений, следовательно, коррекция системы выполнена правильно и показатели качества удовлетворяют заданным условиям.
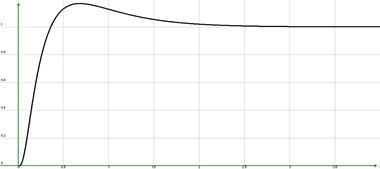
Рисунок 4.2 - Переходная характеристика скорректированной системы
4.2 Принципиальная схема корректирующего звена
После расчета, который показал, что спроектированная система удовлетворяет поставленным требованиям, составляем принципиальную схему (рис.4.2) и рассчитываем все ее составляющие.
![]() - разделительный усилитель.
- разделительный усилитель.
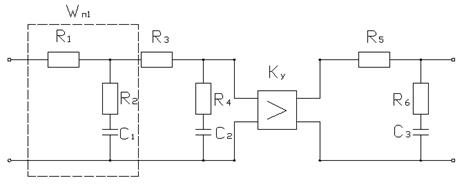
Рисунок 4.3 – Принципиальная схема корректирующего звена
Рассмотрим часть схемы, которой соответствует передаточная функция Wп1 , равная(4.3):
![]() . (4.3)
. (4.3)
Расчет элементов схемы ![]() выполняем по формулам(4.4-4.5):
выполняем по формулам(4.4-4.5):
![]() , (4.4)
, (4.4)
![]() . (4.5)
. (4.5)
Номинальные значения элементов схемы: